一、智能机器东谈主技能架构演进:从分层死心到端到端智能
智能机器东谈主技能架构正经验从“分层式”向“端到端”的范式荡漾。分层式架构将感知、明白、决策、实施解耦,模块化进度高、可解说性强,但信息传递损耗大、泛化智商弱;端到端架构通过大模子顺利映射输入(视觉/言语)到输出(手脚),信息传递高效、泛化智商强,但可解说性差、安全性难保险。2026年呈现“分层式主导、端到端探索”的过渡特征。
图表:智能机器东谈主技能架构演进门道

图表:2026年主流厂商技能门道采用

1、分层式架构:工程化落地的基石
分层式架构是2026年工业场景主流决策,典型经由为:多模态传感器(RGB相机、深度相机、激光雷达、IMU、力传感器)采集环境信息,经SLAM算法构建舆图、物体识别算法和会场景,大言语模子(LLM)或多模态模子(VLM)进行任务经营生成行径序列,畅通经营算法生成轨迹,底层死心器实施伺服死心。
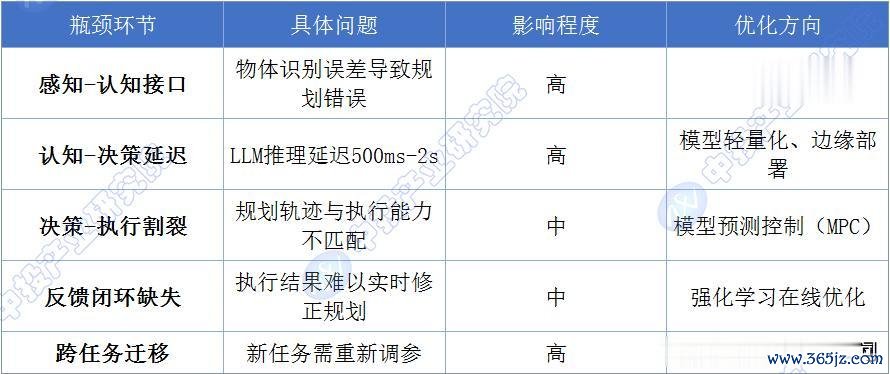
优必选Walker系列罗致分层架构,表层接入百度文心、阿里通义等国产大模子进行任务和会,中层自研畅通死心算法保险双足行走端庄性,基层伺服启动器杀青1000Hz及时死心。该架构上风在于:模块化假想便于调试改变,分层优化保险安全性,工程化教训度高。舛误在于:信息在层间传递存在损耗,各模块优化目的不一致导致全局次优,新任务适配需再行颐养各层参数,泛化智商弱。
图表:分层式架构性能瓶颈分析
2、端到端大模子:通用智能的但愿
端到端大模子顺利学习从视觉/言语输入到手脚输出的映射,代表性模子包括Google RT-2、Figure Helix、智元GO-1等。RT-2将视觉-言语模子(VLM)与机器东谈主死心聚拢,在2D图像上顺利瞻望手脚教导,在未见过的物体和任务上展现出显耀泛化智商。Figure Helix罗致“双系统”架构,系统2(S2)基于7B参数的视觉-言语模子进行慢念念考任务经营,系统1(S1)基于80M参数的Transformer进行快念念考手脚实施,兼顾智能与及时性。
图表:2026年端到端大模子技能参数对比

端到端架构靠近三大挑战:数据瓶颈方面,真机数据采集资本高(单条轨迹$10-100)、安全性条款高,仿真到现实(Sim2Real)转移存在差距,2026岁首部企业数据集规模达百万条级别但仍不及;安全性方面,端到端模子黑箱特质导致空虚难以瞻望妥协说,工业场景容错率低,需引入安全监控层;及时性方面,大模子推理延伸100ms-3s,难以自豪100-1000Hz及时死心需求,2026FIFA世界杯下单平台官网需模子压缩、边际部署、分层加快。
二、具身智能:从“大脑”到“体魄”的交融
具身智能(Embodied AI)强调智能体通过物理体魄与环境的交互学习,区别于离身智能(Disembodied AI)如ChatGPT。2026年具身智能成为机器东谈主规模中枢范式,推进从“软件智能”向“物缄默能”跃迁。
图表:具身智能技能体系架构
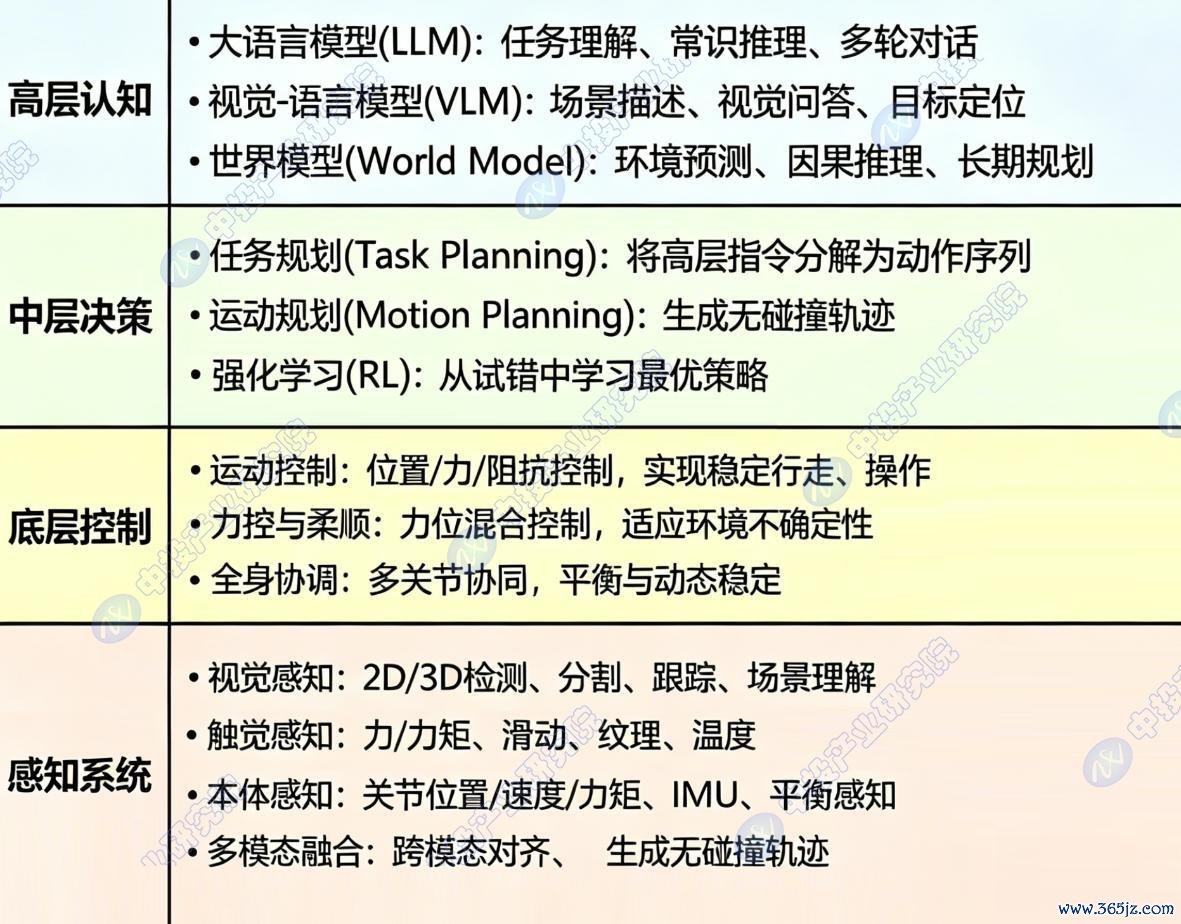
1、宇宙模子:瞻望将来的智商
宇宙模子是具身智能的中枢组件,通过学习环境的动态章程,杀青现象瞻望、因果推理和长久经营。Yann LeCun建议的“目的启动AI架构”强调宇宙模子的中枢肠位,区别于生成式AI的被迫瞻望,宇宙模子提拔主动推理和经营。
2026年宇宙模子呈现“多门道并行、尚未拘谨”的发展态势。
图表:宇宙模子技能门道对比

Tesla World Model从数百万小时驾驶视频和机器东谈主交互数据中学习物理章程,瞻望将来场景发展,撑持FSD和Optimus的决策。Figure AI构建的物理宇宙模子提拔机器东谈主在未知环境中瞻望物体畅通、经营交互计策。宇宙模子的中枢挑战在于因果推明智商不及——模子能瞻望“球会滚”,但难以和会“为什么滚”和“何如阻遏滚动”。
2、多模态感知:从“看见”到“和会”
具身智能条款机器东谈主具备东谈主类级别的多模态感知智商,整合视觉、触觉、听觉、现实嗅觉等信息,酿成对环境的协谐和会。
图表:2026年多模态感知系统技能参数

视觉-言语-手脚(VLA)模子的兴起推进感知-认挚友融。Google RT-2将视觉编码器与言语模子聚拢,和会“提起红色方块”这类教导并输转移作。2026年VLA模子在绵薄合手取任务奏凯率达90%以上,但在复杂操作(如安装、烹调)中奏凯率降至60-70%,主要瓶颈在于细粒度视觉和会(如螺纹对王人、力度死心)和知识推理(如“阻扰易碎品”)。
二、畅通死心:从“端庄行走”到“动态敏捷”
畅通死心是机器东谈主“体魄智能”的中枢,决定机器东谈主的搬动智商、操作精度和环境相宜性。2026年东谈主形机器东谈主畅通死心呈现“双足行走基本处罚、动态敏捷快速逾越、全身配合仍存挑战”的特征。
图表:2024-2026年东谈主形机器东谈主畅通死心智商演进

1、双足行走:ZMP与强化学习的交融
零力矩点(ZMP)死心是双足行走的经典技艺,通过确保ZMP位于撑持多边形内保证端庄性。2026年主流厂商罗致“ZMP+强化学习”混揣测策:ZMP保险基础端庄性,强化学习优化能效和鲁棒性,应酬外部扰动。
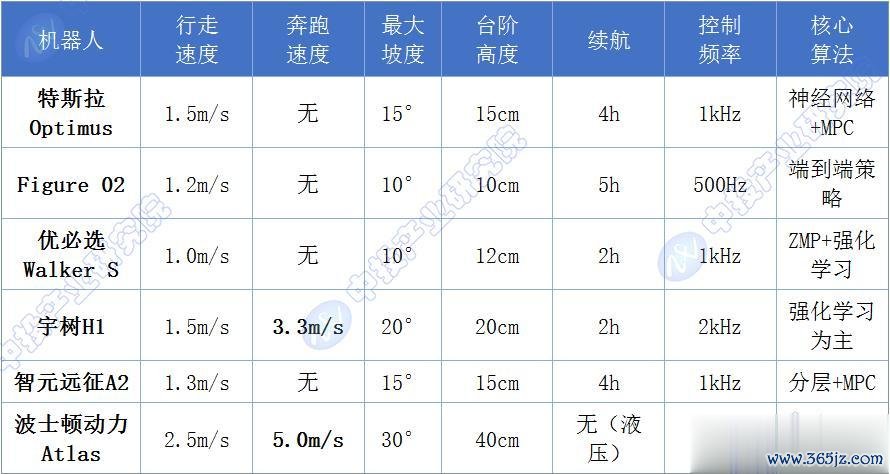
开云的世界杯中国登录网址宇树H1杀青3.3m/s奔走速率(约12km/h),接近东谈主类慢跑水平,罗致强化学习试验全身死心计策,在仿真中试验后转移到真机。波士顿能源Atlas展示后空翻、跑酷等极限手脚,基于模子瞻望死心(MPC)和全身优化,但算法复杂度高、盘算推算资源需求大,难以低资本复制。
图表:2026年主要东谈主形机器东谈主畅通性能对比
2、智谋操作:从“合手取”到“安装”
智谋操作是东谈主形机器东谈主区别于传统工业机器东谈主的中枢智商,条款在多指智谋手、力控、视觉伺服协同下完成复杂操作任务。
图表:2026年智谋手技能参数对比
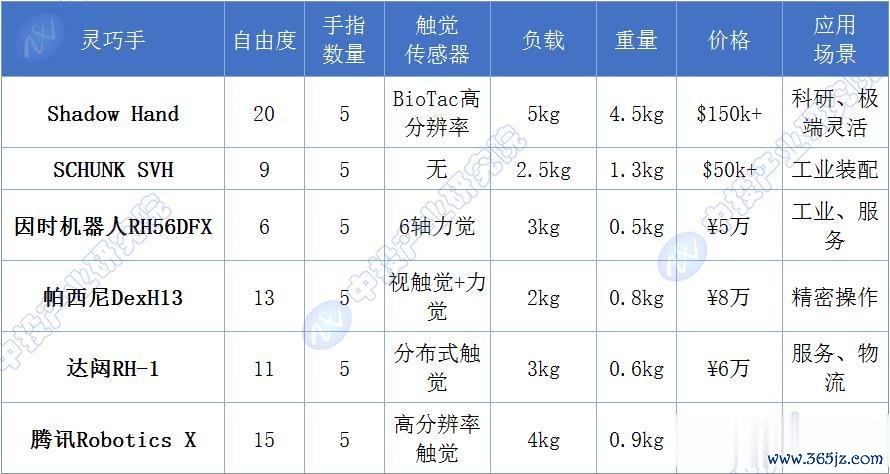
智谋操作的中枢瓶颈在于触觉响应与力控精度。东谈主类手部有17,000个触觉感受器,能感知0.1mm的滑移和0.01N的力变化;2026年机器东谈主智谋手触觉隔离率约1mm、力控精度0.1N,差距2-3个数目级。视触觉传感器(如GelSight)通过视觉不雅测弹性体变形杀青高隔离率触觉,但耐用性和及时性不及。
【中投照看人】是中国当先的产业估量磋商专科机构世界杯下单平台,提供产业估量、产业经营和产业招商的全经由作事,还成就了产业估量磋商的大数据平台【中投照看人产业大脑】。有任何专科问题留情互动换取。
